Mallonga Ĉarnira Levilo Baza Ŝaltilo

-

Alta Precizeco
-

Plibonigita Vivo
-

Vaste Uzata
Produkta Priskribo
La ŝaltilo kun ĉarnira levilo ofertas plilongigitan atingon kaj flekseblecon en aktivigo. La dezajno de la levilo permesas facilan aktivigon kaj estas perfekta por aplikoj kie spacaj limigoj aŭ mallertaj anguloj malfaciligas rektan aktivigon. Ĝi estas ofte uzata en hejmaj aparatoj kaj industriaj kontroloj.
Dimensioj kaj Funkciantaj Karakterizaĵoj
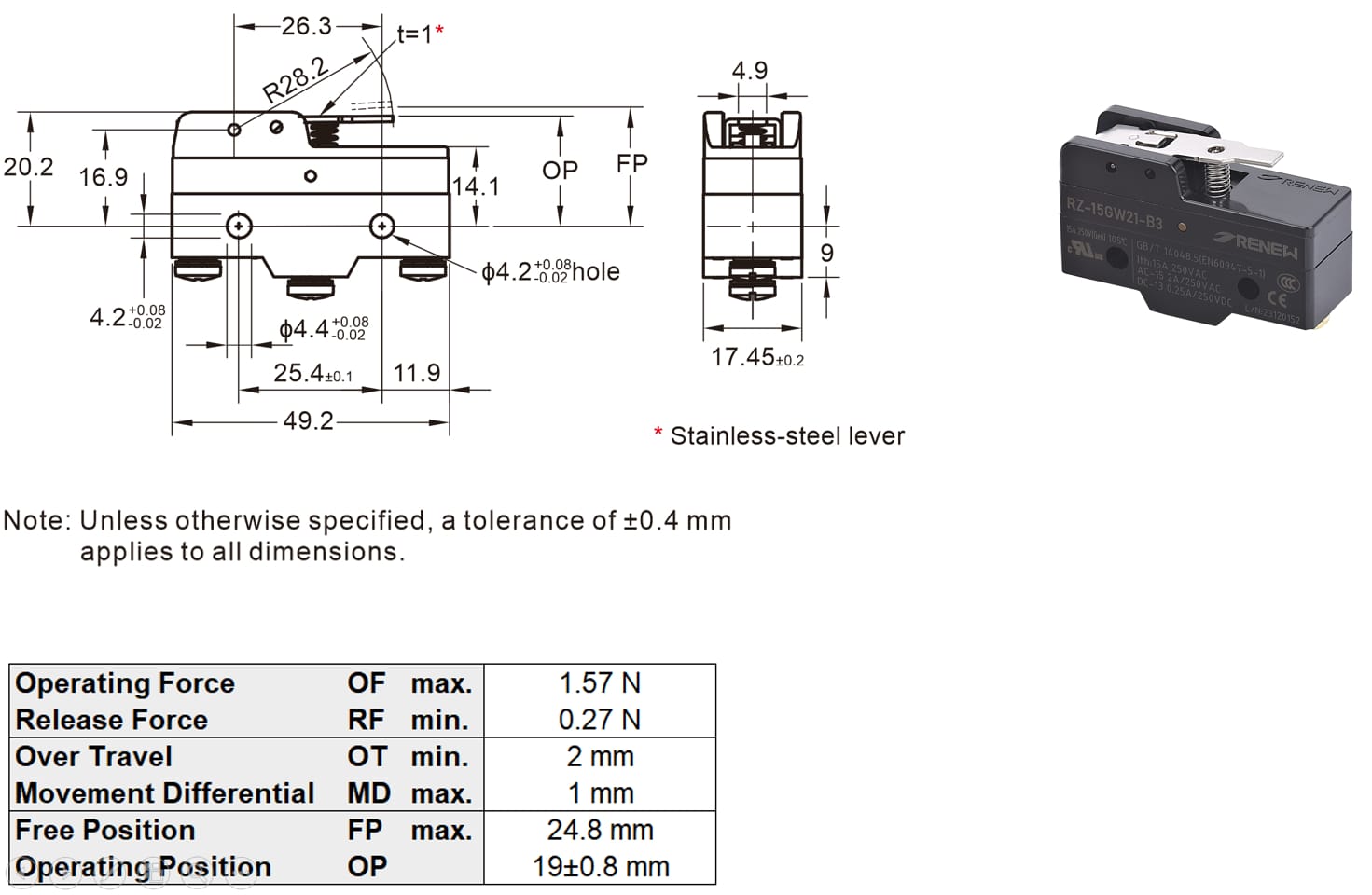
Ĝeneralaj Teknikaj Datumoj
| Rangigo | 15 A, 250 VAC |
| Izoladrezisto | 100 MΩ min. (ĉe 500 VDC) |
| Kontakta rezisto | 15 mΩ maks. (komenca valoro) |
| Dielektra forto | Inter kontaktoj de sama poluseco Kontakta interspaco G: 1,000 VAC, 50/60 Hz dum 1 minuto Kontakta interspaco H: 600 VAC, 50/60 Hz dum 1 minuto Kontakta interspaco E: 1,500 VAC, 50/60 Hz dum 1 minuto |
| Inter kurent-portantaj metalaj partoj kaj tero, kaj inter ĉiu terminalo kaj ne-kurent-portantaj metalaj partoj 2,000 VAC, 50/60 Hz dum 1 minuto | |
| Vibra rezisto por paneo | 10 ĝis 55 Hz, 1,5 mm duobla amplitudo (paneo: maks. 1 ms) |
| Mekanika vivo | Kontakta interspaco G, H: min. 10.000.000 operacioj. Kontakta interspaco E: 300 000 operacioj |
| Elektra vivo | Kontakta interspaco G, H: min. 500 000 operacioj. Kontakta interspaco E: min. 100 000 operacioj. |
| Grado de protekto | Ĝeneraluzebla: IP00 Gutrezista: ekvivalenta al IP62 (krom terminaloj) |
Apliko
La bazaj ŝaltiloj de Renew ludas gravan rolon en certigado de la sekureco, precizeco kaj fidindeco de diversaj aparatoj en diversaj kampoj. Jen kelkaj popularaj aŭ eblaj aplikoj.

Sensiloj kaj monitoradaj aparatoj
Ofte uzata en industri-nivelaj sensiloj kaj monitoradaj aparatoj por kontroli premon kaj fluon per funkciado kiel klak-aga mekanismo ene de la aparatoj.

Industria Maŝinaro
Uzata en maŝiniloj por limigi la maksimuman movadon de ekipaĵoj, kaj por detekti la pozicion de laborpecoj, certigante precizan poziciigadon kaj sekuran funkciadon dum prilaborado.
Artikaj robotaj brakoj kaj kaptiloj
Integrita en artikajn robotbrakojn por uzo en kontrolaj asembleoj kaj provizi fin-de-vojaĝan kaj krad-stilan gvidadon. Integrita en prenilojn de la pojno de la robotbrako por senti tenpremon.













